ARES-M
Atmospheric Remote Environmental System for Mars

ARES-M is an integrated monitoring solution for Mars atmospheric and environmental research, developed during the SMathHacks 2025 hackathon. This platform provides a scalable mesh network of sensor pods that monitor temperature, humidity, seismic activity, UV/IR radiation, and soil moisture. The distributed sensor array enables real-time environmental data acquisition across multiple geographic locations simultaneously on the Martian surface.
Contents
Overview
ARES-M (Atmospheric Remote Environmental System for Mars) is an integrated hardware-software solution featuring a distributed sensor network for comprehensive Martian environmental monitoring. Developed during the SMathHacks 2025 hackathon, this system enables real-time detection of temperature, humidity, seismic activity, UV/IR radiation, and soil moisture across the Martian surface.
The project's innovative approach centers on a scalable mesh network of sensor pods that can be deployed across varied Martian terrain, providing high-resolution environmental data that was previously impossible to gather with conventional single-location rovers. Each pod contains multiple specialized sensors and can be dropped into remote or unreachable locations, continuously monitoring and transmitting data to a central visualization platform.
Inspiration
The idea for ARES-M emerged from the need for a more efficient and scalable approach to environmental monitoring on Mars. Existing planetary weather stations such as NASA's InSight lander and Curiosity's REMS provide valuable atmospheric and seismic data but are limited in coverage and flexibility.
Traditional monitoring approaches offer stationary readings from a single location or can only gather data wherever the rover happens to be. These limitations pose challenges for understanding global weather patterns, seismic activity, and potential water presence on Mars.
Given the planet's extreme conditions—dust storms, drastic temperature shifts, and geological activity—there is a critical need for a distributed, autonomous sensor system capable of continuous real-time data collection across multiple locations.
Evolution of Concept
Our initial vision for ARES-M was centered on creating a comprehensive atmospheric and environmental monitoring system, with a strong focus on air quality analysis. Originally, we planned to incorporate sensors for:
- Volatile organic compounds (VOC)
- Carbon dioxide (CO₂)
- Particulate matter (PM2.5/PM10)
- Temperature and humidity
- Seismic activity detection
Due to logistical challenges during the 48-hour hackathon, we pivoted to include sunlight sensors (UV/IR) and enhanced seismic monitoring instead. This adjustment allowed us to capture even more important environmental data while streamlining our hardware integration. Ultraviolet and infrared radiation monitoring is particularly relevant for Martian exploration since it helps assess surface conditions, radiation exposure risks, and potential atmospheric dust interactions.
CAD Design
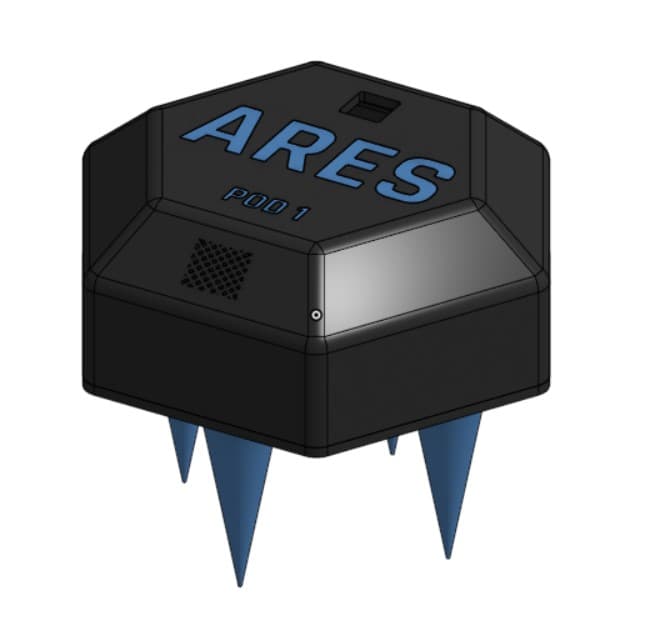
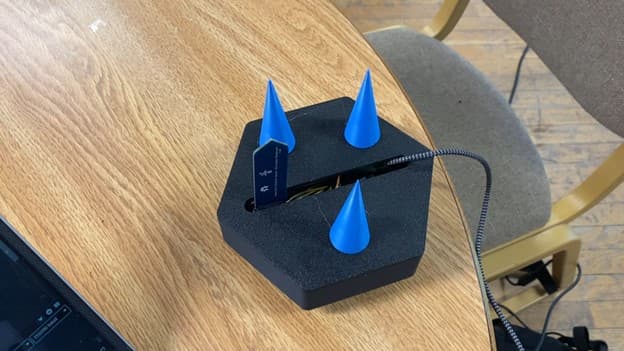
Hexagonal pod design with ground-securing spikes
Since we developed the entire device in only two days, we created a simple yet highly effective and theme-matching CAD model. The design features a hexagonal case for our electronics, with strategically placed openings for sensor access and environmental contact points.
Pod Housing

Top view showing sensor access points
The pod housing features dedicated openings on the top for essential sensors:
- Mesh opening beneath the "Pod 1" label houses the temperature/humidity sensor
- Small cutout above the ARES insignia accommodates the sunlight (UV/IR) sensor
- Bottom opening allows the soil moisture sensor to deploy into Martian soil
- Sealed interior compartment protects electronic components from dust and radiation
The hexagonal design provides optimal stability when deployed on uneven Martian terrain while maximizing internal space efficiency for component placement.
Internal Mounts
The internal architecture includes custom-designed mounts for each sensor type:
- Temperature/humidity sensor mount with protective mesh
- Upward-facing sunlight sensor mount with transparent cover
- MPU6050 accelerometer/gyroscope mount for seismic detection
- Servo motor mount for soil moisture sensor deployment
- Circuit board mounting points for secure attachment
Each mount is designed to position its sensor optimally while protecting it from Martian dust and extreme conditions.
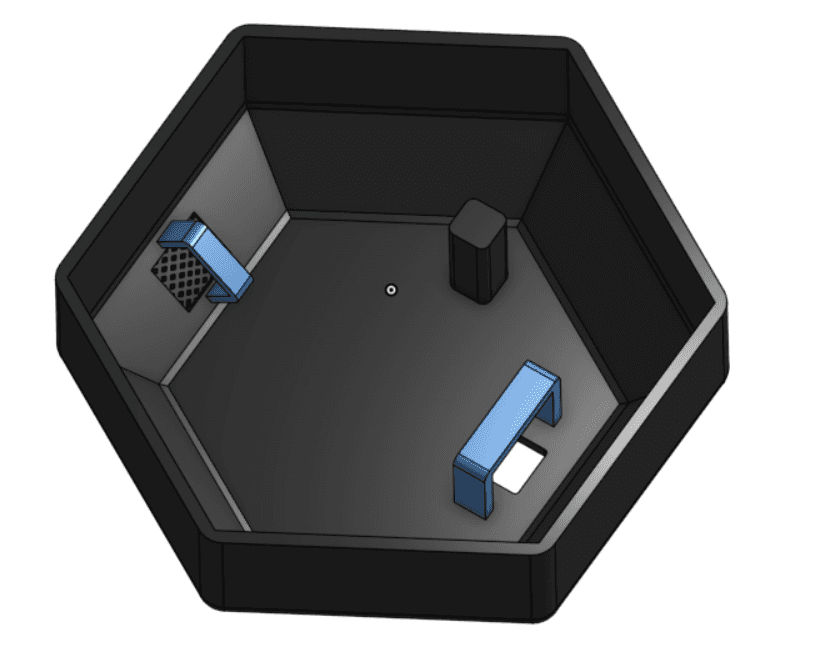
Internal sensor mount configuration
Ground Anchoring
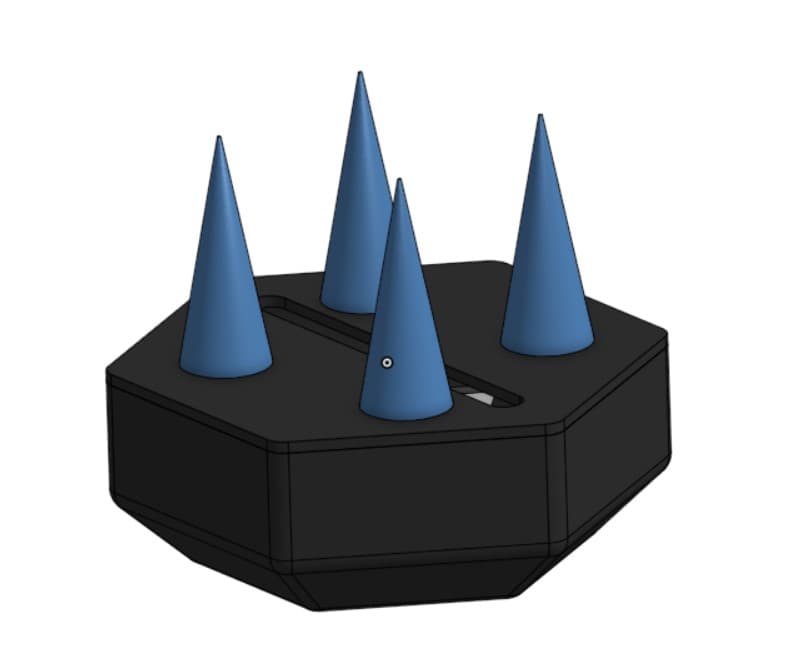
Bottom view showing ground-securing spikes
A critical feature of the ARES-M pod design is its ground anchoring system:
- Multiple spikes extend from the bottom surface
- Designed to penetrate Martian soil when pod is dropped from height
- Secures the pod against Martian dust storms and winds
- Center opening allows soil moisture sensor deployment
- Maintains pod stability during seismic events to ensure accurate readings
This anchoring system is essential for the pod's long-term stability in Mars' harsh environment, especially during seasonal dust storms and temperature fluctuations.
Sensors Analysis
ARES-M integrates multiple specialized sensors to provide comprehensive environmental monitoring on Mars. Each sensor was selected for its ability to operate in the harsh Martian conditions while providing critical scientific data.
Temperature & Humidity
The sensor suite provides essential climate data for Mars exploration:
- Temperature range: -40°C to 80°C (adequate for Martian day cycles)
- Humidity detection even in Mars' extremely dry atmosphere
- Digital single-wire interface minimizes connection failures
- Low power consumption for extended operation
- Protected by mesh housing to prevent dust contamination
Temperature and humidity data are crucial for understanding Martian weather patterns, predicting environmental conditions, and assessing habitability for both equipment and potential microscopic life.
Sensor Overview
| Metric | Relevant Sensors | Available during hackathon |
|---|---|---|
| Temperature | DHT11 | ✓ |
| Humidity | DHT11 | ✓ |
| Seismic Activity | MPU6050 | ✓ |
| UV Radiation | SI1145 | ✓ |
| Infrared Radiation | SI1145 | ✓ |
| Soil Moisture | Capacitive Soil Moisture Sensor | ✓ |
Seismic Activity

The MPU6050 inertial measurement unit enables crucial seismic monitoring:
- 3-axis accelerometer detects ground movements with high precision
- 3-axis gyroscope measures rotational changes during seismic events
- Configurable measurement ranges for detecting both subtle and strong events
- I2C interface provides reliable digital communication
- Data helps map subsurface structures and tectonic activity
Seismic measurements on Mars help detect ground vibrations, assess tectonic movement, and analyze subsurface structures, providing vital insights into planetary formation and stability.
UV & IR Radiation
The SI1145 sensor provides critical radiation measurements:
- UV index measurement for surface radiation assessment
- IR detection for thermal analysis and night vision
- Visible light sensing capabilities
- I2C digital interface for reliable data transmission
- Low power consumption suitable for long-term deployment
UV and IR measurements are essential for evaluating solar energy availability, studying atmospheric interactions, and identifying radiation hazards for future human missions. The data helps optimize solar power systems and track dust storms through atmospheric opacity changes.
Soil Moisture
The capacitive soil moisture sensor with servo deployment mechanism:
- Capacitive measurement avoids corrosion issues present in resistive sensors
- Servo motor extends and retracts the sensor into Martian soil
- Measures water content based on soil dielectric properties
- Highly sensitive to even trace amounts of moisture
- Protected design prevents damage during initial landing impact
Soil moisture detection allows for assessing water content, determining surface composition, and identifying potential regions for resource utilization or biological investigation, which is essential for astrobiology and future exploration missions.
Electrical Engineering
The electrical system of ARES-M integrates multiple sensors and components into a unified circuit that can withstand the harsh Martian environment while maintaining reliable operation. All components were selected for their durability, power efficiency, and compatibility with the ESP32 microcontroller platform.
Circuit Design
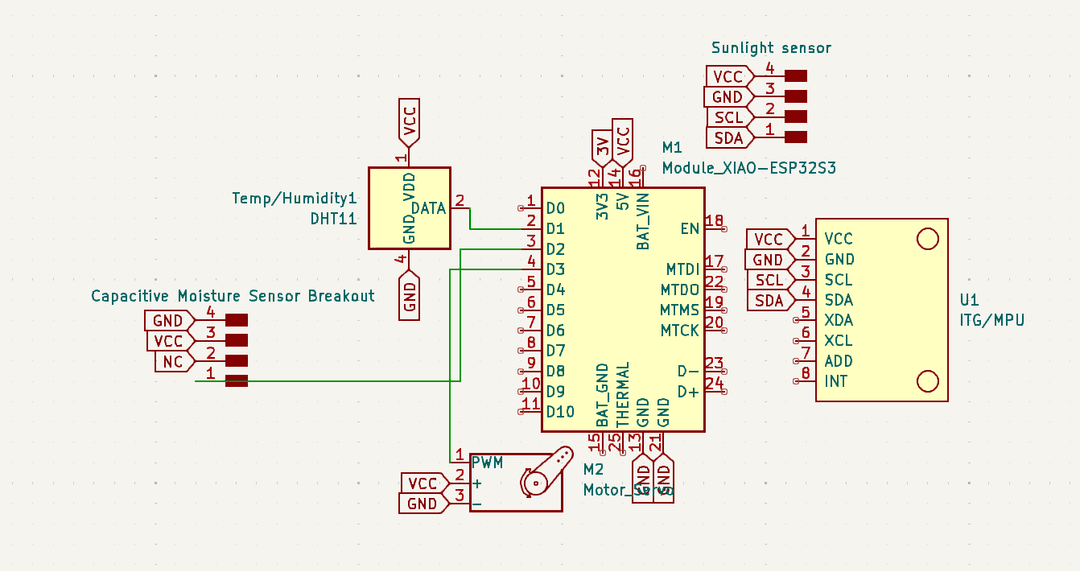
ARES-M circuit schematic
The circuit design incorporates several key elements:
- ESP32 microcontroller as the central processing unit
- I2C bus for digital sensor communication (MPU6050, SI1145)
- Single-wire digital interface for the DHT11 temperature/humidity sensor
- Analog input for the soil moisture sensor readings
- PWM control for the servo motor deployment mechanism
- Power regulation and distribution system
For testing purposes, we first assembled the circuit on a breadboard before creating the final integrated version. This allowed us to verify component functionality and optimize sensor placement.
Servo Integration
A key innovation in the ARES-M design is the soil moisture sensor deployment system:
- Servo motor mounted to the bottom of the pod housing
- Moisture sensor attached to the servo arm for controlled deployment
- Retracted position during landing to protect the sensor
- Extended position during measurement to ensure soil contact
- PWM-controlled positioning for precise depth adjustment
This deployment mechanism ensures the moisture sensor makes proper contact with the Martian soil while protecting it during landing impact. The servo can adjust the sensor depth based on soil conditions and measurement requirements.

Final integrated circuit with servo control
Component Specifications
| Component | Communication Protocol | Connections | Power Requirement |
|---|---|---|---|
| DHT11 | Digital (Single-wire) | VCC, GND, Data | 5V |
| MPU6050 | I2C | VCC, GND, SCL, SDA, INT | 5V |
| SI1145 | I2C | VCC, GND, SCL, SDA | 3.3V |
| Soil Moisture Sensor | Analog | VCC, GND, Analog Output | 3.3V |
| Servo Motor | PWM | VCC, GND, Signal | 5V |
Backend Software
The ARES-M backend software is built around an ESP32-based embedded system that manages sensor data acquisition, processing, and transmission. The system establishes Wi-Fi connections to facilitate remote environmental data collection and transmission to a central server.
Sensor Integration
Sensor Initialization Code
// MPU6050 Initialization
if (!mpu.begin()) {
Serial.println("Failed to find MPU6050 chip");
while (1) { delay(10); }
}
Serial.println("MPU6050 Found!");
// Set MPU6050 ranges and bandwidth
mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
mpu.setGyroRange(MPU6050_RANGE_500_DEG);
mpu.setFilterBandwidth(MPU6050_BAND_5_HZ);
// SI1145 (Sunlight Sensor) Initialization
Serial.println("Initializing SI1145...");
while (!SI1145.Begin()) {
Serial.println("SI1145 not ready, retrying...");
delay(1000);
}
Serial.println("SI1145 is ready!");The backend software initializes and configures each sensor with appropriate parameters:
- MPU6050 accelerometer is set to 8G range for seismic detection
- Gyroscope range of 500 degrees/second captures rotational movement
- 5Hz filter bandwidth balances response time and noise reduction
- DHT11 temperature/humidity sensor uses digital single-wire protocol
- SI1145 UV/IR sensor communicates via I2C interface
- Soil moisture sensor connected to analog input with calibrated scaling
The software includes robust error handling and retry mechanisms to ensure sensors operate reliably despite the challenging Martian environment.
Data Transmission
The ARES-M system transmits environmental data via structured JSON payloads:
- Data from all sensors packaged in a consistent JSON format
- HTTP POST requests send data to a central server
- Bearer token authentication ensures secure transmission
- Geographic positioning data included with each reading
- Transmission occurs every 5 seconds to provide near real-time monitoring
- Buffering mechanism handles temporary connectivity interruptions
The JSON structure is designed to be lightweight yet comprehensive, containing all necessary metadata for accurate data processing and visualization.
Sample JSON Payload
{
"time": 22651,
"stations": [{
"id": "STATION_1",
"latitude": 0.1,
"longitude": 0.1,
"temperature": 23,
"humidity": 36,
"uv": 0.02,
"ir": 254,
"moisture": 52,
"accel": {
"x": 1.019929886,
"y": -0.325611442,
"z": 9.361329079
},
"angVelocity": {
"x": -0.041834611,
"y": 0.022915773,
"z": -0.007993874
}
}]
}Key Software Features
Sensor Data Collection
- Multi-sensor integration with appropriate protocols
- Calibration and unit conversion for scientific accuracy
- Error detection and sensor health monitoring
- Custom drivers for specialized sensor hardware
Network Connectivity
- Wi-Fi mesh network communication between pods
- Secure API integration with authentication
- Connection status monitoring and recovery
- Data buffering during connectivity interruptions
Power Management
- Low-power sleep modes during inactive periods
- Sensor power cycling to extend battery life
- Dynamic power scaling based on activity levels
- Battery status monitoring and reporting
Hardware Control
- Servo control for soil moisture sensor deployment
- Configurable sensor sampling rates and precision
- LED status indicators for diagnostic purposes
- Watchdog timer for system reliability
Frontend Development
The ARES-M frontend provides a comprehensive visualization platform for Martian environmental data. Developed using Next.js, React, TypeScript, and Tailwind CSS, the interface enables researchers to interact with live data from multiple sensor pods deployed across the Martian surface.
Interface Design

Interactive map interface showing deployed sensor pods
The frontend interface features an interactive map of Mars with the following capabilities:
- Interactive geospatial map showing all deployed ARES-M pods
- Click-to-select functionality for individual pod data access
- Navigation toolbar with specialized data visualization sections
- Real-time status indicators for each sensor pod
- Responsive design that works across various device sizes
- Dark theme optimized for scientific workstation use
The navigation system uses intuitive icons to represent different data categories:
- Mars Planet Icon — Home dashboard
- Radio Tower Icon — Pod location information
- Plant Icon — Soil moisture data
- Sun Icon — UV and IR radiation measurements
- Wind Icon — Temperature and humidity data
- Home Icon — Seismic activity monitoring
Data Visualization
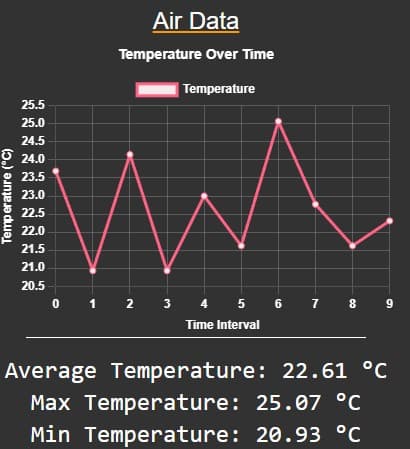
Real-time environmental Air data visualization
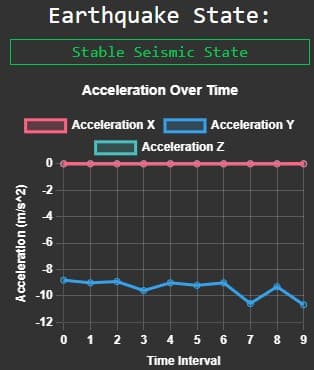
Seismic activity detection interface
The data visualization system utilizes Chart.js to present complex environmental data in accessible formats:
- Time-series charts showing temperature, humidity, and radiation trends
- Real-time seismic waveform displays for detecting Marsquakes
- Soil moisture percentage visualization with historical trending
- UV and IR radiation level monitoring with day/night cycle correlation
- Pod status dashboards showing system health and battery levels
- Comparative data views between multiple pods for environmental mapping
The database architecture uses PostgreSQL with a carefully designed schema that supports efficient querying of time-series environmental data. This enables rapid data retrieval for visualization and scientific analysis, with tables structured to represent stations and their associated weather data payloads.
Technical Implementation
Frontend Technologies
- Next.js React framework for server-side rendering
- TypeScript for type safety and developer productivity
- Tailwind CSS for rapid UI development
- Chart.js for interactive data visualization
- Canvas API for mapping and spatial visualization
Backend Services
- PostgreSQL database for time-series data storage
- Prisma ORM for database interaction
- RESTful API for sensor data ingestion
- Docker deployment for isolated database security
- Authentication system with bearer tokens
Impact & Future Work
Scientific Impact
ARES-M represents a significant advancement in Martian environmental monitoring capabilities with several key impacts:
- First mesh network of environmental sensors for distributed Mars surface monitoring
- Enables simultaneous data collection across geographic regions previously impossible with single rovers
- Provides real-time seismic detection capability across multiple surface locations
- Allows correlation of environmental conditions with subsurface features and potential water presence
- Creates a framework for future autonomous habitat management systems
The distributed nature of ARES-M significantly enhances our understanding of Martian climate patterns, geological activity, and resource distribution, supporting both scientific research and future human exploration missions.

Fully assembled ARES-M pod ready for deployment
Key Achievements
- Developed a complete Mars environmental monitoring solution during a 48-hour hackathon
- Created an integrated hardware-software system spanning sensors, microcontrollers, and data visualization
- Engineered a deployable servo mechanism for soil moisture sensing in Martian regolith
- Implemented a real-time dashboard for visualizing and interpreting complex environmental data
- Designed a scalable architecture that enables future network expansion across the Martian surface
Future Development
While ARES-M began as a hackathon project, it has established a foundation for continued development with several planned enhancements:
- Implementing edge computing techniques to preprocess sensor data before transmission
- Incorporating TinyML models for anomaly detection and predictive analytics
- Improving data transmission efficiency through MQTT or WebSocket protocols
- Enhancing security with advanced encryption for JSON payloads and OAuth 2.0 authentication
- Developing a PCB design for production-ready hardware with improved power efficiency
- Adding additional sensor types for air quality, wind speed, and radiation monitoring